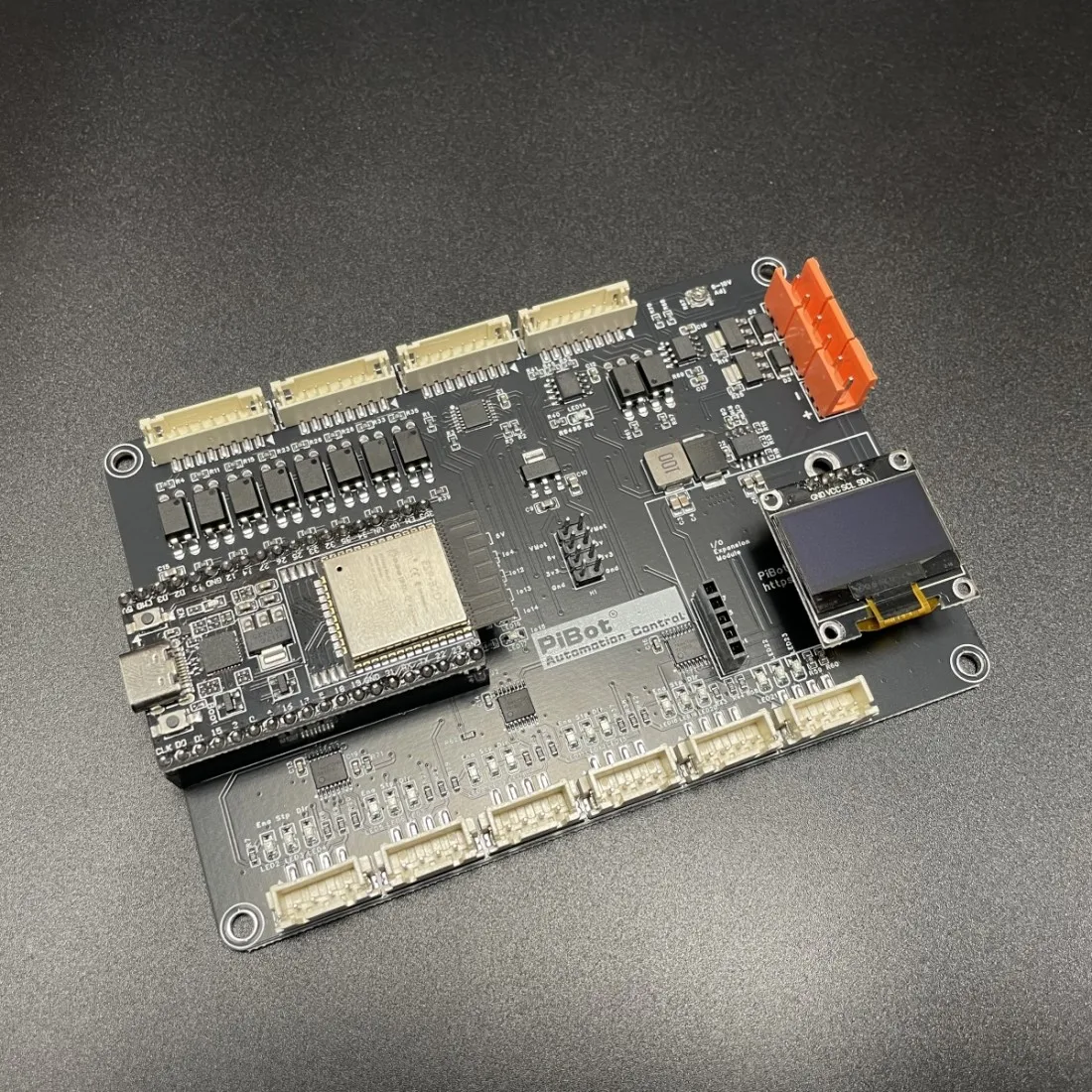
Controlador CNC láser PiBot FluidNC GRBL V4.7 B (solo la placa protectora 4.7B)
You will be redirected to AliExpress to complete your purchase
Specifications
- Nombre de la marca
- OEING
- Producto químico de alta preocupación
- Ninguno
- Espesor de la Tabla
- 1.6mm
- mínimo Tamaño del Orificio
- 0.3mm
- mínimo Espaciado entre líneas
- 10mil
- Origen
- CN(Origen)
- Espesor de Cobre
- 1oz
Product Description
¡En stock! Listo para enviar
Lista de Envío:
1.Placa controladora CNC PiBot FluidNC GRBL Rev4.7B × 1
2.XH2.54 x 6 y PH2.0 x 4
Solo la placa protectora 4.7, sin incluir el módulo OLED y ESP32
Obtén MÁS información en nuestro sitio web.
HA ACTUALIZADO A USB-C
¿Qué es?
Este controlador está diseñado para operar una amplia gama de máquinas CNC.Puede controlar seis motores y es compatible con varios husillos y láseres, incluidos aquellos con salidas PWM, 485 y 0-10V, así como con FluidNC, GRBLHAL y GRBL1.1f.
1.Para el firmware original oficial de FluidNC, adopta la configuración de pines de FluidNC 6x para garantizar una compatibilidad mejorada. FluidNC es muy fácil de configurar.Nunca tendrás que compilar ningún software.Toda la configuración, actualización, etc. se puede realizar a través del navegador web.Proporcionamos un archivo de configuración de ejemplo en formato YAML.
2.Para grblHAL y GRBL1.1, puede configurarlos directamente a través de la plataforma WebBuild en el sitio web oficial de grblHAL.Esta herramienta flash ESP32 también permite cargar firmware fácilmente.Además, gracias al modo de compatibilidad integrado de grblHAL para GRBL1.1f, puede utilizar una amplia gama de software que requiere soporte GRBL1.1f.
3.Puede encontrar información relevante en los sitios wiki oficiales de FluidNC y GRBLHAL.Paralelamente, estamos optimizando nuestro Tutorial Simple con imágenes y vídeos claros para agilizar el proceso de aprendizaje.
4.Software compatible vs. Firmware, Esta tabla se basa en nuestras pruebas realizadas en octubre de 2025.Tenga en cuenta que es posible que se hayan producido cambios en el software o que haya algunas imprecisiones, por lo que puede realizar sus propias pruebas.
Además, algunos programas como Estlcam y Easel tienen requisitos de hardware específicos.Puede utilizar nuestros tableros de control correspondientes, que están diseñados para cumplir con estos requisitos.
Compatible con el firmware original oficial de FluidNC, proporcionamos un archivo de configuración de ejemplo yaml.Puedes obtener el enlace de descarga en nuestro sitio web.
Compatible con el Web-builder oficial GRBLHAL, GRBLHAL se puede configurar al nivel GRBL1.1f.
La placa PIBot V4 es compatible de forma nativa con el OLED GRBLHAL, ya que este código fue contribuido por Luc y probado utilizando la placa base PiBot.
Puedes obtener el enlace de descarga en nuestro sitio web.
Característica
(6) Conectores de motor para controladores paso a paso externos (señales de 5 V).Cada motor tiene señales de paso, dirección y habilitación separadas.
Entradas para interruptores (límites, sondas, control, etc.)
Modo de comunicación: Cable USB o Bluetooth o WIFI
Husillos (se admiten muchos tipos).Algunas configuraciones de múltiples husillos son posibles, como RS485 y láser en la misma máquina.
Husillos controlados de 0-10V con señales adicionales de dirección hacia adelante y hacia atrás
Controladores de velocidad PWM con señales de habilitación separadas opcionales
Husillos controlados por relé (encendido/apagado).
Husillos basados en motor sin escobillas (BESC)
Láseres con PWM y habilitación
Las salidas de 5V del husillo sin usar pueden utilizarse para cualquier función de salida (refrigerante, etc.).
Ranura para tarjeta Micro SD para almacenamiento local de archivos gcode
Zócalo de módulo para extensores GPIO e interfaces colgantes.
Compatible con el controlador de motor paso a paso PiBot Rev2.3 TOSHIBA TB6600 (3.3V 5V o lógica Dgnd, salida máxima 4.12 - 4.5A)
Compatible con la placa de relé aislada PiBot Rev2.3
Cómo funciona
Puedes consultar los tutoriales 4.8 y 4.9 para 4.7. (vea el video en nuestro sitio web: pibot.com)
Paso 0: Preparación: Descargue los siguientes cuatro archivos que necesita:
A. Controlador USB
B. Firmware ESP32
C. Archivos de la interfaz web de fluidnc: index.html e ico
D. Ejemplo de Yaml
Obtén el enlace de descarga en nuestro sitio web.
Si necesita la última versión del software, descargue la última versión de la página web oficial de fluidnc.Somos compatibles.
Paso 1: Instale el controlador USB
(1) Inserte el archivo A preparado anteriormente en su computadora.
(2) Si no se instala correctamente, instálelo manualmente.
(3) Abre "Mi PC", ve a Administrador de dispositivos y navega hasta los puertos COM.
(4) Actualiza el controlador, selecciona "Instalar desde local" y elige todos.
(5) Después de la instalación, se mostrará un CP2102, recuerde este número de puerto.
Paso 2: Subir el firmware fluidnc-grbl (Subida de firmware)
(0) Conéctalo a tu placa base mediante Type-C y alimenta con 12V o 24V (teóricamente, 9-30V es aceptable).
(1) Inserte el archivo B preparado anteriormente en su computadora.
(2) Haga doble clic para abrir la versión WiFi.
(3) Si tiene éxito, se instalará automáticamente; si no, presione el botón de arranque durante tres segundos y suéltelo para iniciar la descarga automática.
(4) Después de la descarga, seleccione la opción 5.
(5) Desconecte la alimentación, espere cinco segundos, luego vuelva a conectar y reinicie la MCU.
Paso 3: Sube los archivos necesarios para la interfaz web de fluidnc (Instala la interfaz web).
(1) Después de reiniciar la MCU, encontrará fluidnc en la red WiFi de su computadora.
(2) Conéctese con la contraseña 12345678.
(3) Una vez conectado, ingrese 192.168.0.1 en su navegador.
(4) Sube los archivos requeridos, no interrumpas el proceso.
(6) Después de la carga, verá la opción de ingresar a la interfaz web-fluidnc.
Paso 4: Sube el archivo de configuración YAML necesario para CNC y configura tu red (Configura tu máquina)
(1) Dentro de la interfaz, haga clic aquí para continuar.
(2) Sube el archivo YAML que necesitas para fines de prueba.Después de realizar pruebas, modifíquelo según sus requisitos de CNC utilizando esta plantilla.
(3) Haz clic en "Configurar" cuando hayas terminado.
(3) Aquí también puede configurar su acceso a la LAN, consulte los detalles.
(4) Desconecte la alimentación, espere cinco segundos, luego vuelva a conectar y reinicie la placa base.
(6) La placa base ahora está lista para funcionar.Si tienes OLED, puedes ver información básica.
Paso 5: Ejemplo de prueba de hardware
(0) Diagrama de distribución de pines de la placa base.
Figura - 1
Figura - 2
Figura - 3
Figura - 4
Figura - 5
Figura - 6
(1) Ejemplo de prueba de salida de relé // PWM // 0-10V en la configuración predeterminada de YAML.(Usar prueba de webUI)
De forma predeterminada, GPIO 26 funciona como una salida de relé.También puedes cambiar su jumper para usarlo como entrada.Insertar a la izquierda para operación de relé e insertar a la derecha para operación de terminal.
Un.Abra la página webUI.
B. Haga clic en el botón de desbloqueo.
C. Ingrese M6 para mostrar la herramienta predeterminada, T0 como un relé.
D. Ingrese M6 T0 para probar PWM.
Ingrese M3 S255, escuchará un sonido de tic-tac, lo que indica que ha comenzado a funcionar.
Ingrese el comando M5 para detener.
E. Ingrese M6 T1 para probar PWM.
Verá el puerto IO.4 parpadeando.
F. Ingrese M6 T2 para probar el láser.
Verás el puerto IO.12 parpadeando.
G. Ingrese M6 T3 para probar 0-10V.
Verás el puerto IO.13 parpadeando.
H. Ingrese M6 T4 para probar 485.
Verás el puerto IO.14 IO.15 parpadeando.
Prueba avanzada 1: si conecta un osciloscopio, verá cómo cambia la forma de onda PWM.
Prueba avanzada 2: si conectas un multímetro verás que el voltaje de 0-10 V cambia.
Prueba Avanzada 3: Si conecta un convertidor de frecuencia, verá que el valor del registro cambia (o use la simulación de un osciloscopio).
(2) Esquema interno de la unidad (utilizando el formato YAML proporcionado como ejemplo) (prueba con el software de control OpenBuilds)
A. Configuración de los pines de puente del controlador del motor paso a paso, como se muestra en el diagrama:
B. V4.8A Solo es compatible con el modelo "en dir clk gnd". Si utiliza TMC5160, por favor configure este modelo.
Prueba Avanzada 4: Utilice el controlador OpenBuild para probar el disparo de la sonda (PROBE) y el interruptor de límite.
Prueba Avanzada 5: Utilice OLED para probar el disparo del interruptor de límite.
(3) Esquema de unidad externa (usando el formato YAML proporcionado anteriormente como ejemplo)
Un.Se recomienda utilizar una fuente de alimentación independiente para la alimentación externa.
b.Compatible con relé de hardware REV2.3.
C. Compatible con hardware REV2.3 TB6600 o controlador DM420, etc.
pin_paso: I2SO.2
dirección_pin: I2SO.1
desactivar_pin: I2SO.0: bajo
Archivo Uno: Diagrama esquemático.
Obtén MÁS información en nuestro sitio web.
Product information last updated on March 18, 2026